Home
News
People
Publications
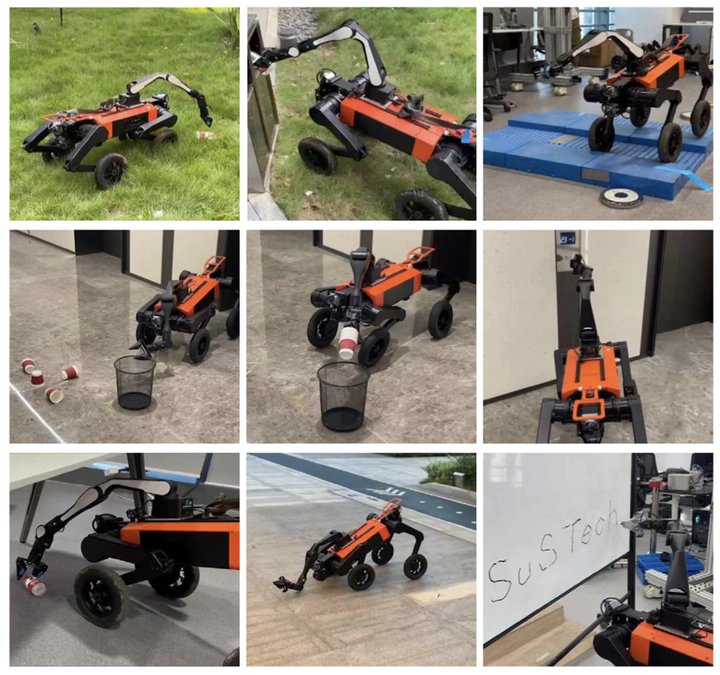
Learning Whole-Body Loco-Manipulation for Omni-Directional Task Space Pose Tracking With a Wheeled-Quadrupedal-Manipulator
Kaiwen Jiang
,
Zhen Fu
,
Junde Guo
,
Wei Zhang
,
Hua Chen
December 2024
Cite
Arxiv
Project Page
Type
1
Publication
In IEEE Robotics and Automation Letters
Cite
×