Our work is accepted by ICRA 2025.
We are excited to announce that our latest research titled “Beyond Robustness: Learning Unknown Dynamic Load Adaptation for Quadruped Locomotion on Rough Terrain” has been accepted by ICRA 2025.
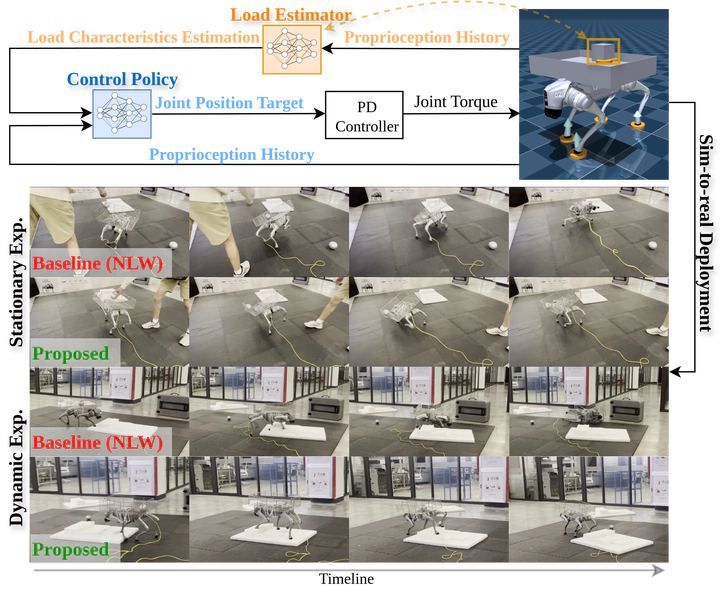
This work explores a novel approach to enable quadruped robots to adapt to unknown dynamic loads while traversing rough terrains, using only proprioceptive sensing. By proposing a general load modeling method and integrating it to the proposed RL training framework, our method significantly improves the robot’s ability to stabilize loads and maintain balance on complex terrains. Check out our project page for more details!