Two of our recent works are accepted by RA-L.
We are pleased to announce that our latest work “CTS: Concurrent Teacher-Student Reinforcement Learning for Legged Locomotion” and “Learning Whole-Body Loco-Manipulation for Omni-Directional Task Space Pose Tracking with a Wheeled-Quadrupedal-Manipulator” has been accepted by IEEE Robotics and Automation Letters (RA-L).
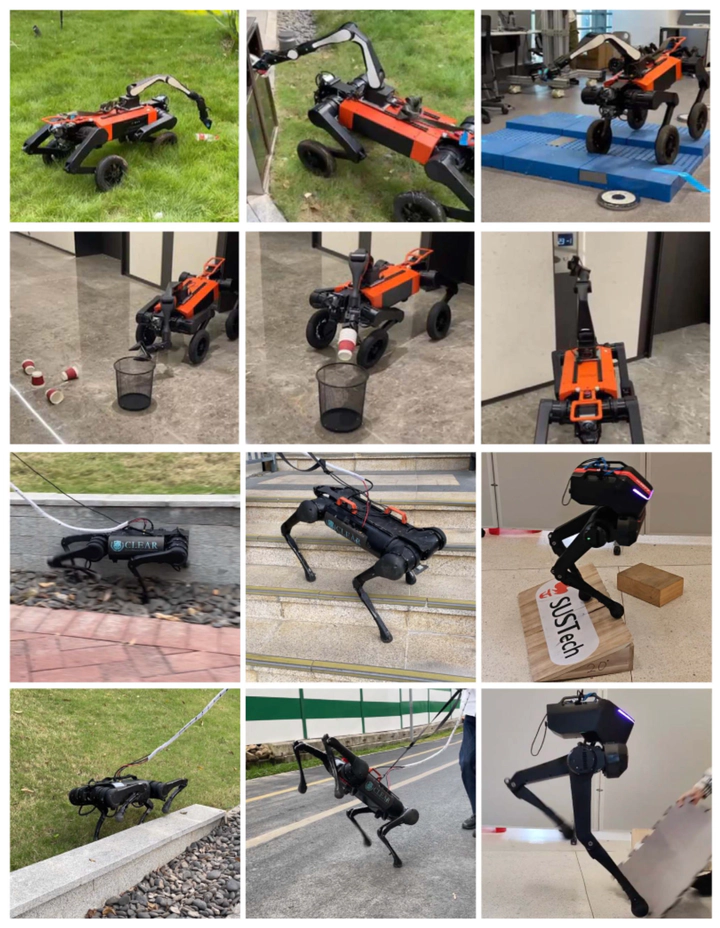
In CTS paper, we introduces a novel Concurrent Teacher-Student reinforcement learning architecture designed to enhance the locomotion capabilities of legged robots over complex terrains using only proprioceptive sensing. Unlike traditional teacher-student paradigms, our CTS framework trains teacher and student policies concurrently, leveraging reinforcement learning objectives to improve policy performance. Through extensive simulation and real-world experiments on quadruped and bipedal robots, we demonstrate that our approach achieves up to 20% improvement in velocity tracking error compared to state-of-the-art methods and showcases exceptional robustness and adaptability in challenging environments. Learn more about our work at project page.
In paper “Learning Whole-Body Loco-Manipulation for Omni-Directional Task Space Pose Tracking with a Wheeled-Quadrupedal-Manipulator”, we explores the challenge of coordinating the locomotion and manipulation capabilities of a wheeled-quadrupedal robot to achieve precise 6D end-effector pose tracking in task space using reinforcement learning (RL). We introduce a novel Reward Fusion Module (RFM) that integrates reward terms in a nonlinear manner, enabling the robot to balance locomotion and manipulation tasks seamlessly. Our method achieves state-of-the-art tracking accuracy, with position errors less than 5 cm and rotation errors less than 0.1 rad. Extensive simulations and real-world experiments demonstrate the effectiveness of our approach in enabling smooth and precise loco-manipulation. More details can be found in our project page.